

 QQ
QQ
库卡机器人的安全信号与IO模块是相互独立的,即安全信号不是通过IO信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。
安全信号接入方式有3种,其中2种是通过安全软件协议去实现的,下面就接入方式进行介绍:
1)种方式:Profisafe,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以Profinet总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置Profinet总线通信。
2)第二种方式:CIP-Safety,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以EtherNet IP总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置EtherNet IP总线通信。
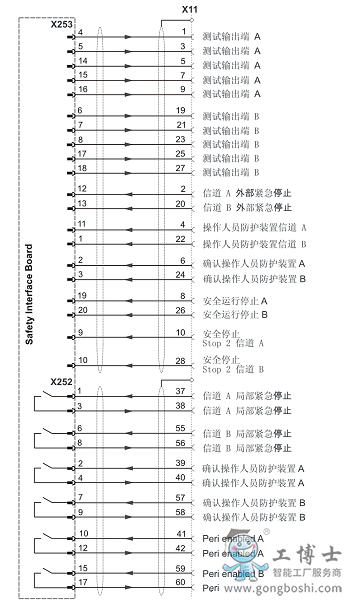
3)第三种方式:X11接头+SIB(Safety Interface Board,用于连接安全信号的接口板),安全信号通过线缆的方式接入X11接头里。
1:种方式和第二种方式一般在汽车厂运用比较多。第三种方式在其他通用领域用的多,比如搬运、码垛、弧焊等。
2:库卡机器人的安全信号均采用双通道方式,确保系统的安全。
安全信号——X11接头接线说明
由于Profisafe、CIP-Safety两种方式是通过软件通信协议配置安全信号的,在配套PLC软件编程中实现。因此,在这里只介绍安全信号通过X11接头的接线图。

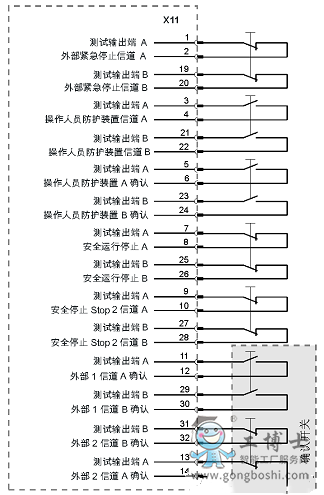

备注:库卡机器人提供安全接口,其余的设备附件由用户提供 .
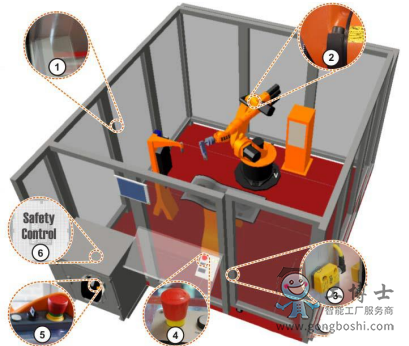
1 防护栅
此文转载自网络
更多关于库卡机器人产品请点击:http://kuka-grinding.gongboshi.com/
